Sejj [Cjj12 421
GLS估计量在上述假设下也是无偏的(Sen和Srivastava 1990):
Pj j = 0,1。GLS回归参数估计器的性质当然也适用于WLS (GLS的一种特殊情况,其中V是对角线,且对角线元素不相等)和OLS (GLS的一种特殊情况,其中V是对角线,且对角线元素相等)。在OLS的情况下,标准误差可以用简短的显式形式表示(Montgomery和Peck 1992):
F " \ 2r n / n \2 ^ 1/2
se ^ = MSEf 1 / n + (E t (i) /) / (E t (i) 2 - (E t (i)) / n我= 1 = 1 = 1
0.90
自相关系数,a

I-i - | - i - | - i - | - i - 0.85 0.5 0.6 0.7 0.8 0.9 1.0自相关系数,a
1.0 0.0 _等效自相关系数,a
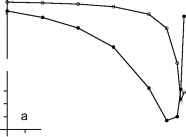
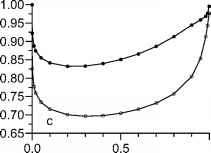
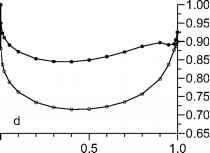
图4.2。线性回归估计器的GLS与OLS标准误差。GLS标准误差se^, j = 0(截距)和1(斜率)由式(4.21)给出。当V不是对角线且对角线元素相等时,OLS标准误差由矩阵(T'T)-1T'VT(T'T)-1对角线元素的平方根给出(Montgomery and Peck 1992)。在每个面板中,对Xnoise(i)的AR(1)模型的自相关系数(均匀间距)或等效自相关系数(不均匀间距)绘制标准误差的比值。a间隔均匀,截距;B间距均匀,斜率大;C间距不均,截距;D间距不均,坡度大;填充符号,n = 100; open symbols, n = 1000. The uneven time spacing (c, d) was generated as t(i) = i2,i = 1,... , n and scaled to d = 1. Here, the coefficient of variation of the spacing, CVd, is approximately 3-1/2 « 0.58. The even time spacing has d(i) = 1.
在GLS的情况下,标准误差和ci的计算通常需要一些矩阵运算(第4.5节)。
有人可能会问,当假设成立并且使用OLS时,尽管V有一些非零的非对角线元素,会发生什么。答案是OLS估计量仍然是无偏的(Montgomery和Peck 1992),但比GLS估计量有更大的标准误差。这种效应与气候学实际应用的相关性如下(图4.2)。GLS减小误差的大小取决于自相关和间隔。对于AR(1)自相关,即使间隔和数据大小在100到1000之间,标准误差(斜率,截距)的降低小于13%;对于典型CVd值略高于0.5的不均匀间距(图1.15),减少量小于31%。有趣的是,即使间隔均匀,标准误差的减少只有在大的自相关时才变得相当大(上面,比如,0.9)(图4.2a, b),而对于不均匀间隔,在大的自相关范围内是这样(图4.2c, d)。因此,无论自相关是强还是弱,对不均匀间隔的气候时间序列的回归估计确实可能受益于GLS。raybet雷竞技最新
4.1.4.1表扬-温斯顿程序
Prais和Winsten(1954)在AR(1)持续性假设下应用EGLS估计的方法对气候时间序列分析具有较高的相关性。raybet雷竞技最新在这里,持久性的可变性和大小通常是未知的,必须进行估计。在这种情况下,可以使用以下步骤(算法4.2)获得回归参数A0和a的CI,这个CI被表示为经典,因为它的构造假设是高斯形状的噪声。在许多实际情况下,单个更新循环应该已经提供了一个令人满意的回归解决方案:从OLS或WLS开始,计算残差,更新V并执行GLS。
4.1.4.2 Cochrane-Orcutt变换
另一个尊重噪声过程AR(1)自相关的想法是转换变量。考虑
继续阅读:女朋友
这篇文章有用吗?